D3
A History of Oil and Nuclear Accidents In the United States
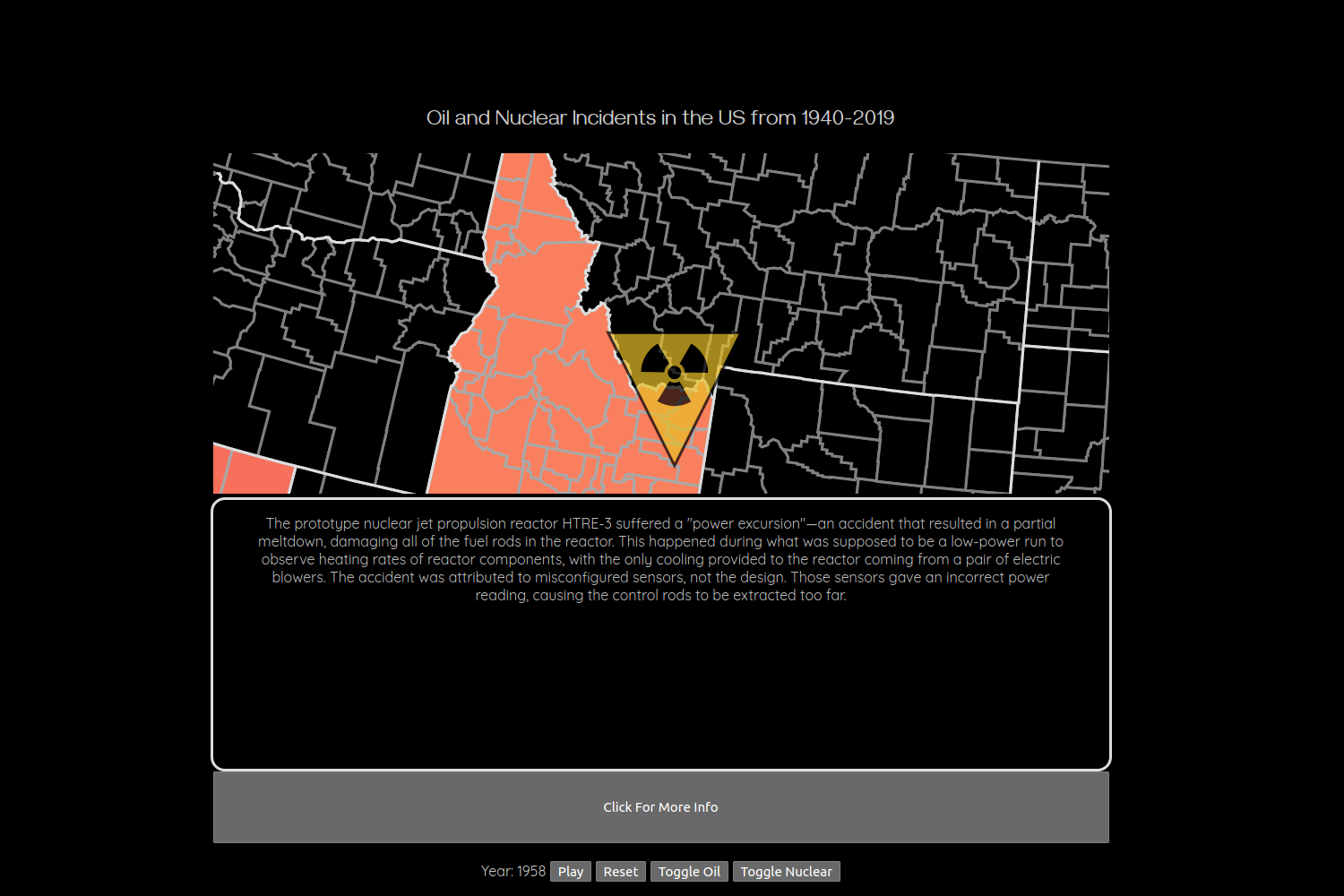
This project created a dynamic visualization of oil and nuclear accidents in the US from 1940 to now. This project compiled and analyzed 150 individual events, creating:
- A visual comparison of incident count per decade
- A comparison of Injuries vs tonnes of oil
- A map of the USA with animated timeline, density map, individual event descriptions, destruction bubble graph, and compiled links to all source information
D3, Observable
Visualizing Walmart’s Growth
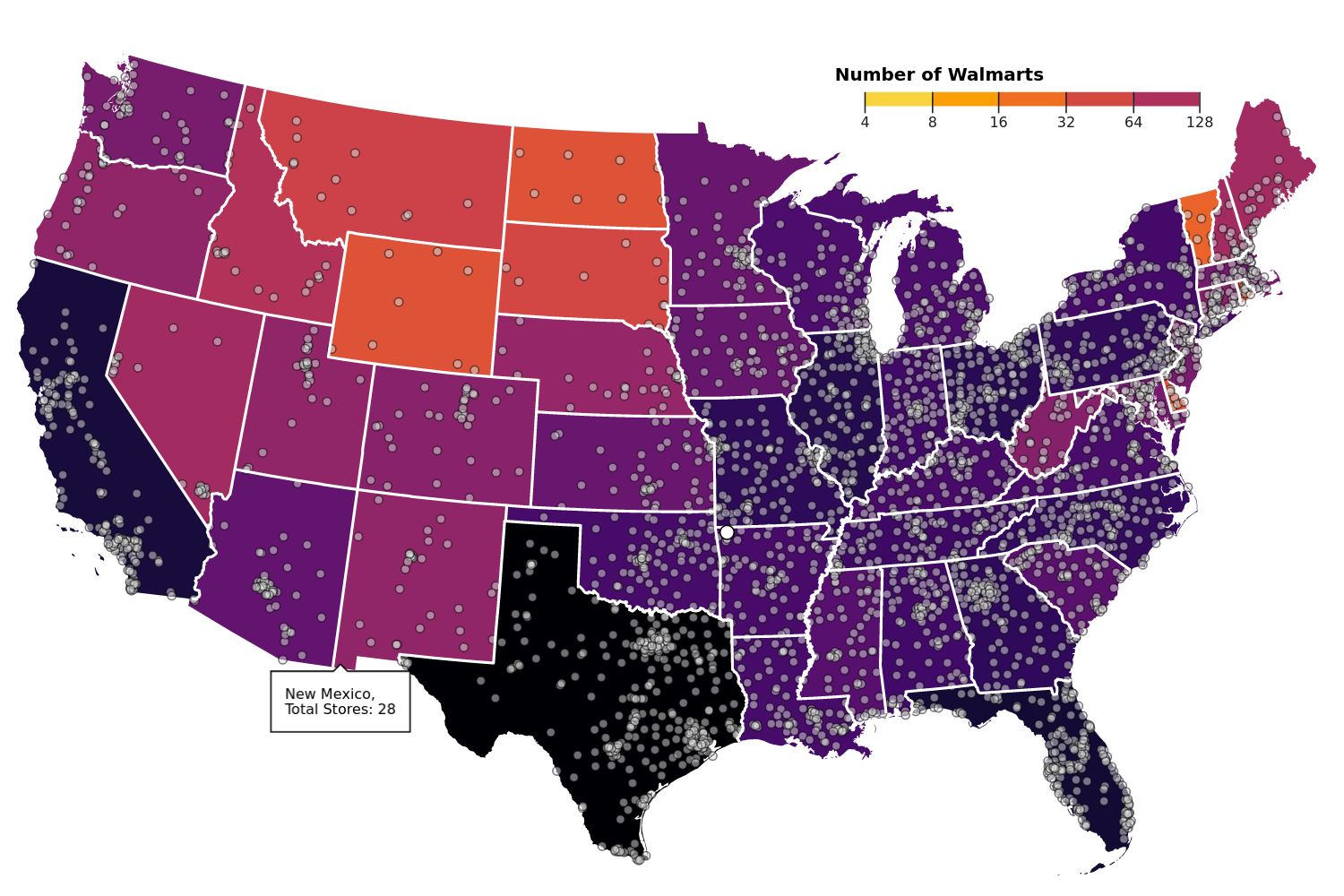
A redesign of Mike Bostock's Walmart's Growth: this was an exercise in identifying problem areas in existing data and remixing the visualization to give the user more information with higher clarity.
Newly implemented features included:
- A density color map, linking the placement of Walmarts on the map directly to the positioned state
- Dynamic tooltips marking the year, state, store number, and total number of Walmarts per state
- A growth scatter-chart, indicating the boom of Walmart
D3, MariaDB, Apache2 web server, PHP, R
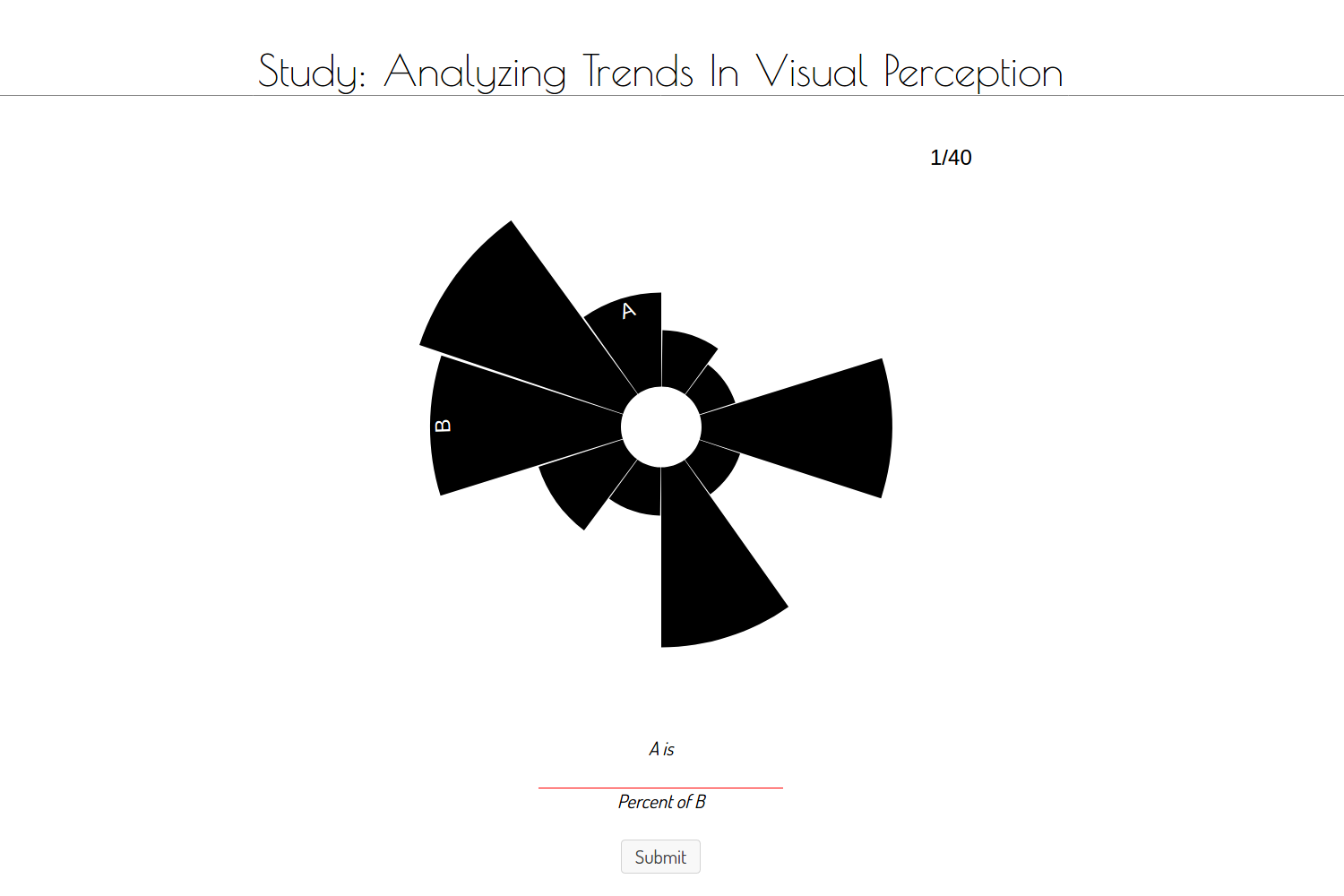
Analyzing Trends In Visual Perception
A follow up to the classic Graphical Perception: Theory, Experimentation, and Application to the Development of Graphical Methods by Cleveland et al., this project utilized bar charts as a control and examined them against lollipop charts, circular charts, and treemaps.
ARGoS, ROS, Gazebo, Python, C++, Google Cloud Computing, Docker
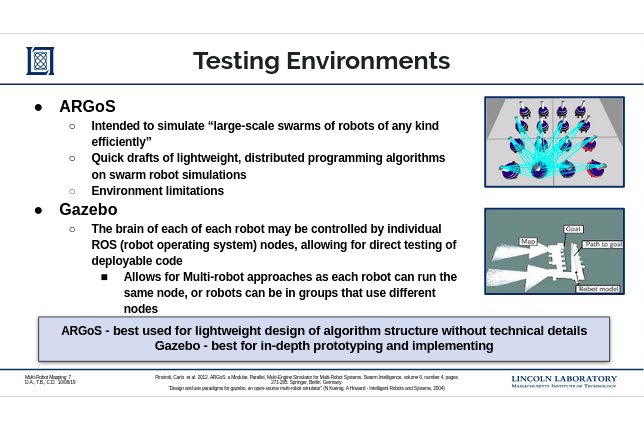
Major Qualifying Project - Efficient Multi Robot Mapping: Quick and Sustained Environmental Surveying with Limited Communication
The goal of this project was to assist the laboratory with creating a resilient multi-robot SLAM methodology for deployment in degraded environments.
In particular, we were to research and develop an algorithm that could:
- Create an initial map quickly
- Survey continuously, scanning for changes in the environment
- Rendezvous with other robots as needed
- Adapt to the loss of robots
- Be easily scalable
The result of this project yielded a most-viable, in-simulation algorithm ready for physical deployment
Under release review
Yang et al., Jun 2019
ROS, Python, Keras, PCL
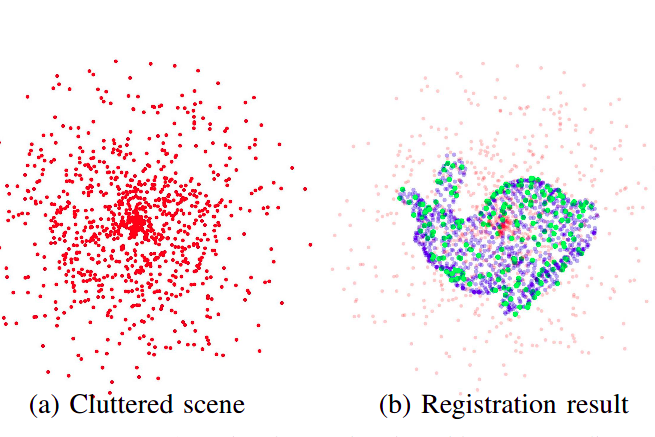
Teaser Pipeline
This project created a pipeline for robust, real-time registration of 3D point clouds in multi-robot drone systems.
- Extends A Polynomial-time Solution for Robust Registration with Extreme Outlier Rates (Yang et al., Jun 2019)
- Isolates and generates a target object based on simultaneous RGB and depth input streams
- Tolerates up to 99% outliers
- Out performs RANSAC methodologies in standard registration benchmarks
Under release review
ARGoS, Buzz, Python
Conveying Directional Information Through Regional Division in Swarms
- Prototyped with the Khepera IV in ARGoS
- Created a passive swarm robotics dispersion method using adaptive boosting to identify key points and areas of interest without needing to create and maintain internalized maps
- Robots that discovered areas of interest would, using LED Indicators, partition themselves into positive and negative regions, which would instruct observers of the direction of travel
- Logistic discovery rate with high robustness to accumulated error -- up to 90 degree directional error per individual robot

Plasticine Clay, Armature Wire
Humanities Capstone
Classical studies of maquettes comprised of:
- Major anatomical study involving in depth analysis of human musculature and skeletal systems
- Reproduction of the human form through classical clay sculpture
- The full creation pipeline of an original character from 2D design portfolio to 3D, clay sculpted maquette
- A production ready model capable of full articulation for use in professional stop motion settings
Python
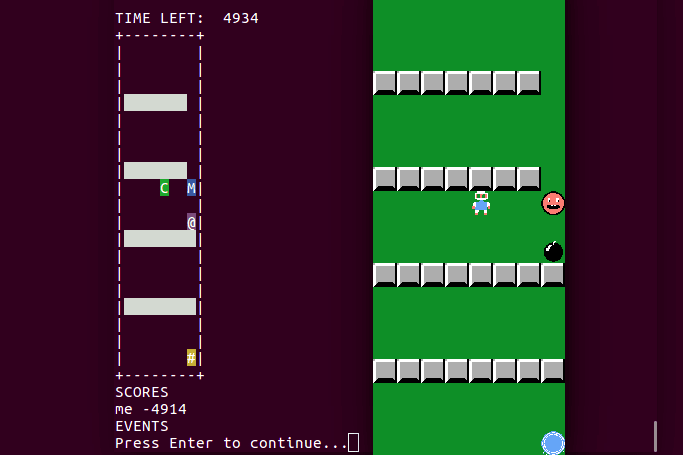
Megaman Adversarial A.I.
This project produced an AI capable of playing the game Bomberman, specifically for a pygame edition created by Carlo Pinciroli.
- Utilized Expectimax to trap and kill adversaries
- Utilized Greedy best-first search methodologies to dynamically react to hazards and reach exit
Python, Keras, Google Cloud Computing
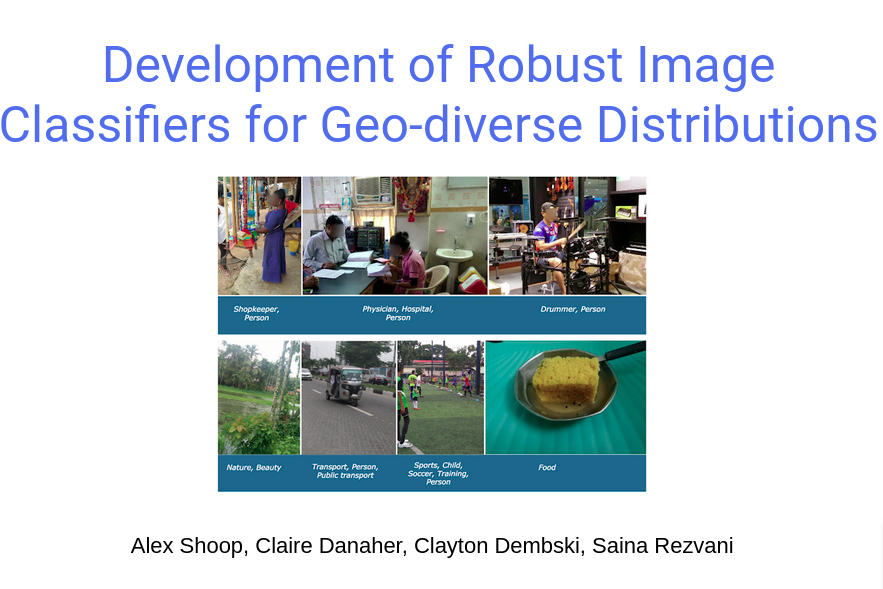
Development of Robust Image Classifiers for Geo-diverse Distributions
This team project focused on the development of robust image input to improve classification of machine learning models. By doing so, models could better classify pictures from geographically diverse regions (primarily non-Americas and non-European).
- Utilized two 37,000 image subsets of the Open Images Dataset, one unmodified, and one with edge image information only
- Trained multiple Convolutional Neural Networks on each of the two data sets
- Discovered an increased accuracy of up to 6% in lightweight classifiers by removing tonal information
- Extremely effective when classifying people, as people are highly diverse in skin tone and clothing appearance
Unity, C#, Ableton Live 10
Creating a Composition Tool that Inspires Youth to Explore Musical Arrangement
Over 4 months, this capstone project focused on the development of a free composition tool for middle school students as an introduction to music theory.
The learning tool:
- Personified music notes taught basics of syncopation, polyrhythms, scale construction, and chord creation
- Allowed for free and restricted play and would interpret and recommend chords based on users work
- Was deployed to a series of music educators as a continuing project under professor Vincent Manzo
Report | Demo to Come
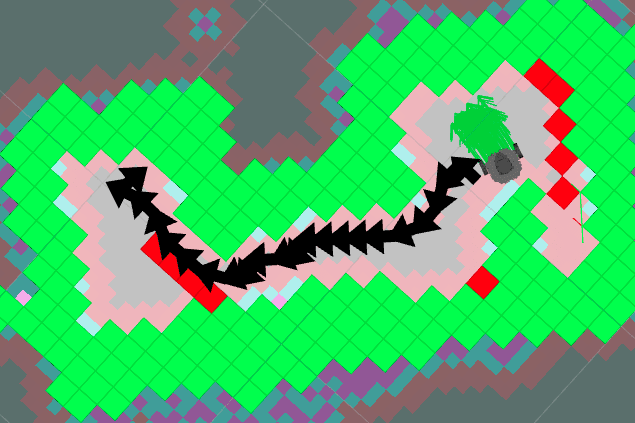
ROS, RVIZ, Gazebo, Python, C++
Autonomous Maze Navigation Robot
This project utilized ROS and RVIZ to create a series of Python programs for a frontier based Simultaneous Localization and Mapping application. This application was deployed on a Turtlebot3 in a physical environment.
The robot:
- Localized using Monte Carlo methodologies and the Extended Khalman Filter
- Dynamically path found through the physical space using D*
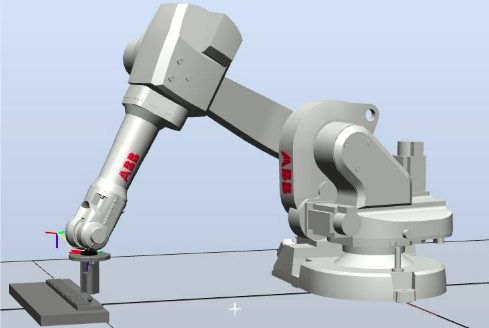
Rapid, Robot Studios
ABB Industrial Arm
The goal of this project was to utilize the ABB IRB 1600 robotic arm to play a song on a Casio SA-76 keyboard autonomously and with ease. Additionally, the project allowed for easy programming of songs in a modular and efficient manner.
The project:
- Gave hands on experience with full design lifecycle, from simulation to operation, using an industry standard robotic arm
- Rigorously employed frame transformations and calculations using DH parameters
- Utilized Robot Studios and Rapid code to effectively instruct an Industrial ABB IRB Robotic Arm

Solidworks, Mbed, Nucleo-144, C++, Matlab
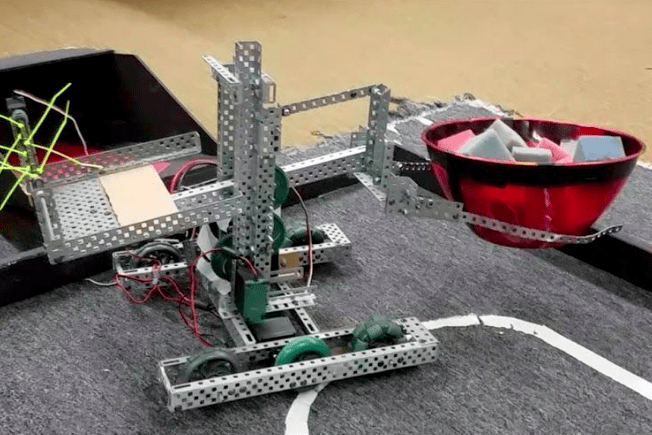
Weight and Color Sorting With a Robotic Arm
The task of this final project was to use our 3 Degree Of Freedom arm in tandem with an rgb webcam to identify individual objects in 2D projected space, acquire and weigh them, then sort them by both color and weight.
The automated robotic sorting system:
- Smoothed Trajectories and avoided inversions based on data from our measurements and calculated inverse kinematics
- Utilized changes in current flow to accurately weigh items
- Utilized OpenCV to dynamically identify and filter the xy positions of objects newly entering the system

Java, JavaFX
WPI Hackathon 2018: Procedural Music Generator
An entry for WPI’s 2018 hackathon, this project ranked second overall and was voted most popular.
Over 48 hours, with two other teammates, we:
- Scraped and created chord probability data from Hooktheory’s 13,000 song database
- Created a finished program that would generate and play a new piece of music based probabilistically from our chord tree
- Allowed users to choose a starting chord and bpm
- Created an animation software to show the frequency of each note in the song while the song played
Java, JavaFX
Pathfinding Kiosk for Brigham and Women's Hospital
Instructed and organized nine other software engineers in creating a pathfinding and service request application for a 4 layer, square mile hospital.
Features included:
- Searchable room numbers and areas of interest
- Persistent Storage of the Staff IDs and the map Nodes and Edges
- In application editing tools, allowing for Admin to update paths based on renovations
- Email notifications and response resolution for service requests
- Heatmap of most populated areas based on search traffic
Git | Demo To Come
Zbrush, 3ds Max, Unreal Engine
Full Model Creation Pipeline
Through this project, I underwent the entire process lifecycle of creating a fully formed, usable model for use within a 3d physics and game engine.
Process included:
- Generating an idea for an original character
- Creating references and sculpting the character in zbrush
- Refactoring the character to render in real time
- Generating full body texture maps
- Rigging the entire character for use in a game engine
- Adapting and testing character for full use inside the Unreal game engine
Textured Model Untextured Model | Raw Objects to come | Demo To Come
SolidWorks, C++, Arduino
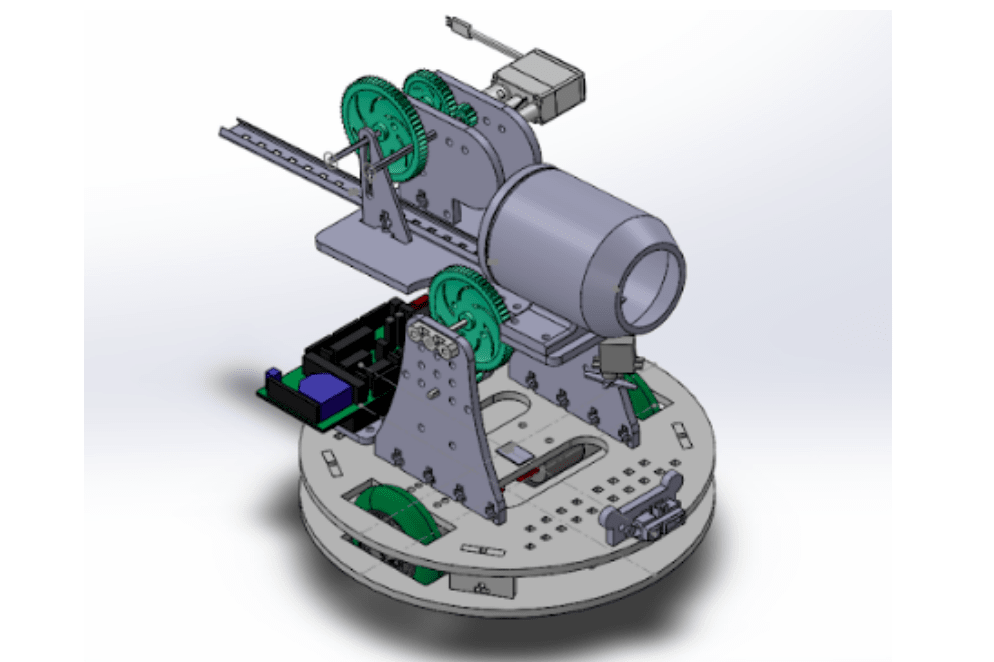
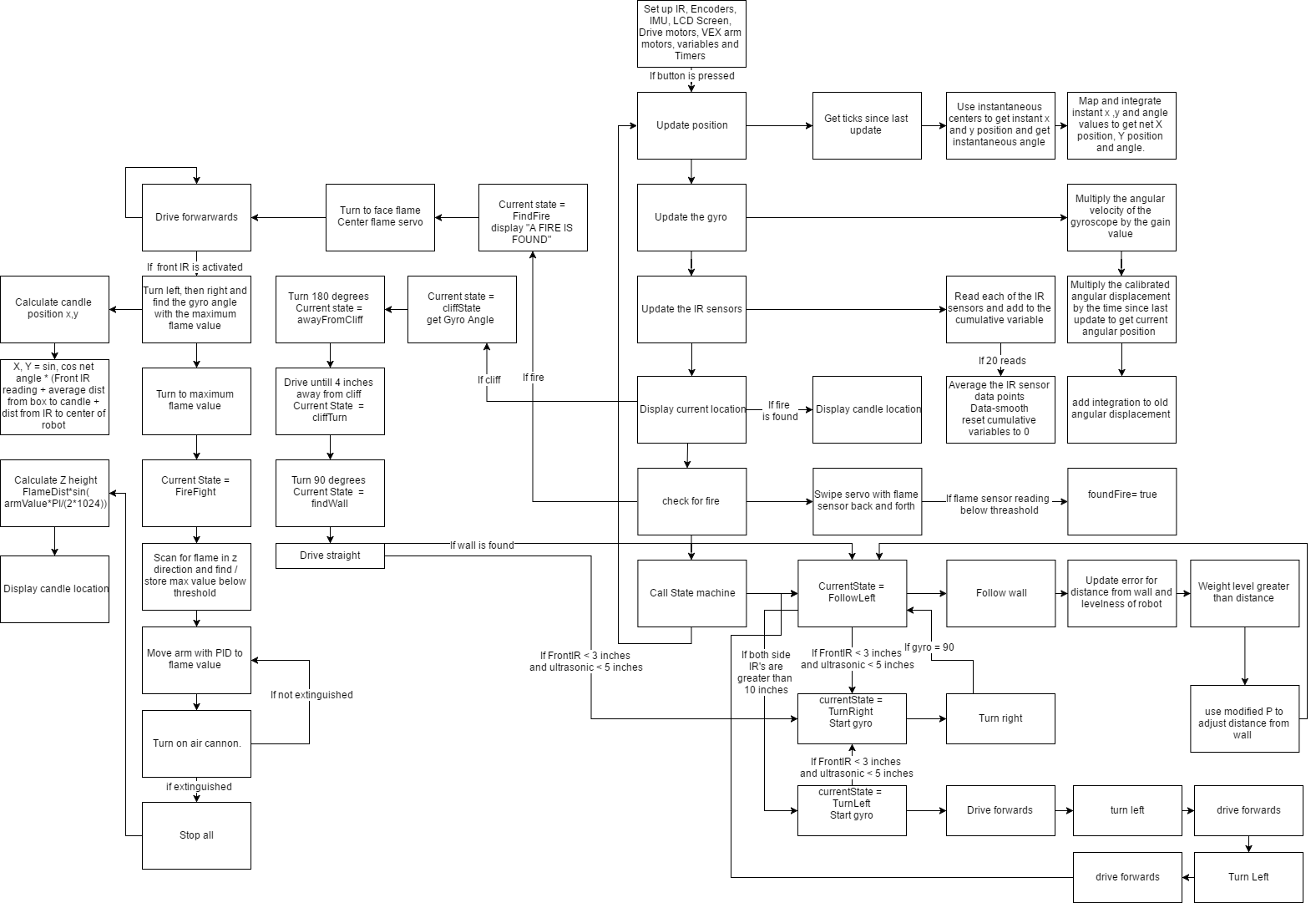
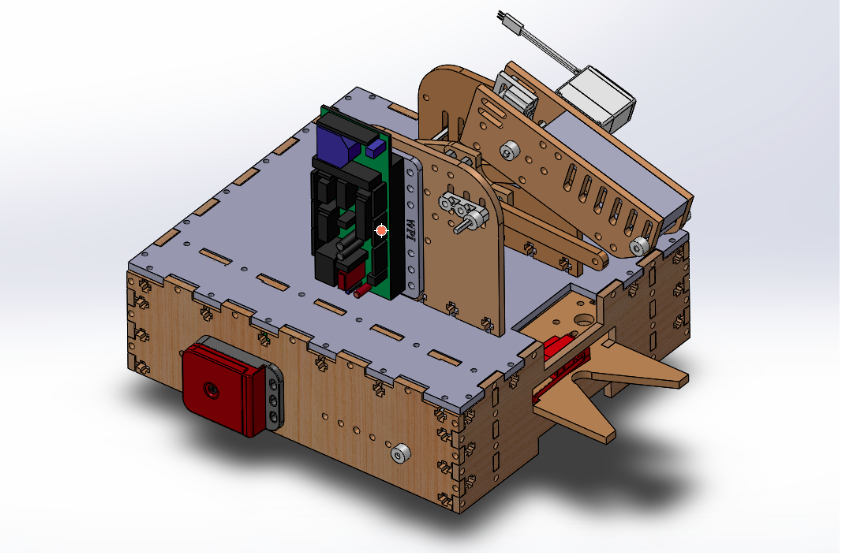
Flame Identifying Robotic Extinguisher Prototype
During this project I, in a team of 4, created a firefighting robot capable of tracking its relative location from A to B in an X, Y plane, using the Arduino Prototyping Platform
The robot:
- Accurately found, tracked, and extinguished a lit flame using Sharp IR, Ultrasonic, and Heat sensors, reporting it’s final x,y, and z location to within 土 2 inches
- Utilized a stereo tracking system and sets of Gaussian distributions to accurately follow a wall at a user-chosen distance
{kind=link}
SolidWorks, C++, Arduino
Warehouse Transport Robot Prototype
This project focused on designing and manufacturing an autonomous robot to assist humans by replacing simple power systems.
With a team of 3 we:
- Constructed a robot with a 2 Degree Of Freedom arm to remove and replace “Fuel Rods” in narrow targets
- Executed a complex state machine to track current location on a matrix system
- Implemented a packet protocol system to communicate to an external Master through Bluetooth, so that one could tell which rod needed replenishing
C++, Arduino
Stod Bot
Our team of 3 designed and built a highly effective robot for this WPI based, FIRST robotics competition, Savage Soccer.
The design took second place within the competition and:
- Utilized a double U drop drive base and an extendable four bar mechanism for high mobility, stability, and heightened reach
- Created a high speed, high volume intake for quick acquisition of objects of interest